
Akıllı Mikro Robotların Özellikleri
Paul Scherrer Enstitüsü PSI ve ETH Zürih’teki araştırmacılar, farklı eylemler gerçekleştirebilecek bir mikromakine geliştirdi. İlk önce mikro robotların bileşenlerinde bulunan nanomagnetler manyetik olarak programlanır ve daha sonra çeşitli hareketler manyetik alanlar tarafından kontrol edilir.
Boyut olarak sadece birkaç mikrometre olan bu makineler, insan vücudunda küçük işlemler yapmak için kullanılabilir. Araştırmacılar sonuçlarını Nature bilimsel dergisinde yayınladı.
Sadece birkaç mikrometre ölçüsündeki robot, Japon kağıt katlama sanatı origami ile yapılan bir kağıt kuşu andırıyor. Ancak, bir kağıt yapısından farklı olarak robot, görünür bir kuvvet olmadan, sanki sihirliymişçesine hareket edebiliyor. Kanatlarını çırpar veya boynunu büker ve kafasını geri çeker, bu eylemlerin tümü manyetizma ile mümkün olmaktadır.
Paul Scherrer Enstitüsü PSI ve ETH Zürih’teki araştırmacılar, mikro makineyi küçük nano manyetikler içeren malzemelerle inşa ettiler. Bu nano-manyetikler, belirli bir manyetik yönelimi üstlenecek şekilde programlanabiliyor.
Programlanan nano manyetikler daha sonra manyetik bir alana maruz kaldığında, üzerlerine belirli kuvvetler etki ediyor. Bu mıknatıslar esnek bileşenlere yerleştirilmişse, üzerlerine etki eden kuvvetler bileşenlerin hareket etmesine imkan verir.
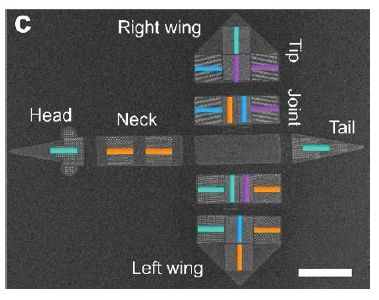
Taramalı elektron mikroskobu görüntüsü, nano ölçekli mıknatısların
düzenlemeleri kuş ile benzer bir yapıyı göstermektedir.
Mıknatıslar, renk çubuklarına paralel farklı yönlerde mıknatıslanabilir.
Mıknatıslanmalarını programlayarak, araştırmacılar
kuşun manyetik bir alanda farklı hareketler gerçekleştirmesini
sağlayabilirler. (Fotoğraf: Paul Scherrer Enstitüsü / İsviçre Federal
Teknoloji Enstitüsü, Zürih)
Nanomagnetlerin Programlanması
Nano manyetikler tekrar tekrar programlanabilir. Bu yeniden programlama farklı kuvvetlerle sonuçlanır ve yeni hareketler mümkün olur. Mikrobotun inşası için araştırmacılar, kobalt mıknatıs dizilerini ince silikon nitrür tabakaları üzerine imal etti.
Bu malzemeden inşa edilen kuş şeklindeki mikrobotlar daha sonra kanat çırpma, asılı kalma, dönme veya yana kayma gibi çeşitli hareketler yapabilir.
PSI’de Çok Ölçekli Malzemeler Deneyleri Laboratuvarı Başkanı ve ETH Zürih’te Mezoskopik Sistemler Profesörü Laura Heyderman, “Mikro robot tarafından yapılan hareketler milisaniye içerisinde gerçekleşiyor” diyor. “Fakat nanomagnetlerin programlanması sadece birkaç nanosaniye sürüyor.
Bu, farklı hareketleri birbiri ardına programlamayı mümkün kılıyor. Bu, küçük mikro kuşun ilk önce kanatlarını çırpabileceğini, sonra yana hareketi ve daha sonra tekrar kanat çırpabileceğini gösteriyor. İhtiyaç duyulduğunda kuş sabit durumda da kalabilir” diyor Heyderman.
Akıllı Mikro Robotlar
Bu yeni konsept, yalnızca belirli bir eylemde bulunacak bilgileri depolamakla kalmayıp aynı zamanda farklı görevleri yerine getirmek için yeniden programlanabilen mikro ve nanorobotlara yönelik önemli bir adımdır.
ETH Zürih Makine ve Proses Mühendisliği Bölüm Başkanı Bradley Nelson, “Gelecekte, özerk bir mikro makinenin, insan kan damarlarında dolaşacağı ve kanser hücrelerini öldürme gibi biyomedikal görevleri gerçekleştirebileceği düşünülebilir” dedi.
ETH Zürih’teki Robotik ve Akıllı Sistemler Enstitüsü’nden bir araştırmacı olan Tianyun Huang, “Diğer uygulama alanları da düşünülebilir, örneğin optik özelliklerini değiştirme yeteneğine sahip esnek mikroelektronikler ya da mikrolensler”.
Ek olarak, yüzeylerin özelliklerinin değiştiği uygulamalar da mümkündür. Mesoscopic Systems Lab’da çalışan mühendis ve araştırmacı Jizhai Cui “Örneğin su ile ıslatılabilecek veya su itebilecek yüzeyler oluşturmak için kullanılabilir” şeklinde görüşünü aktarıyor.